Вы точно человек?
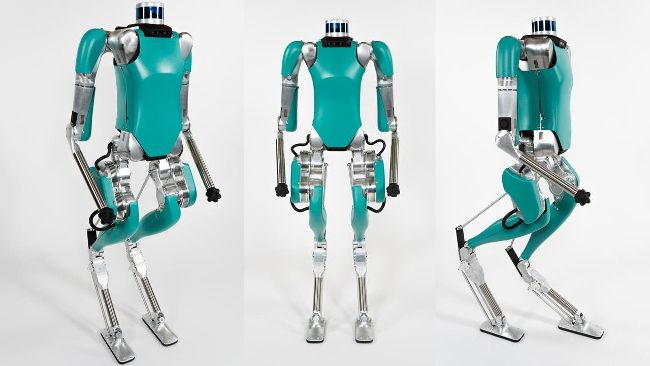
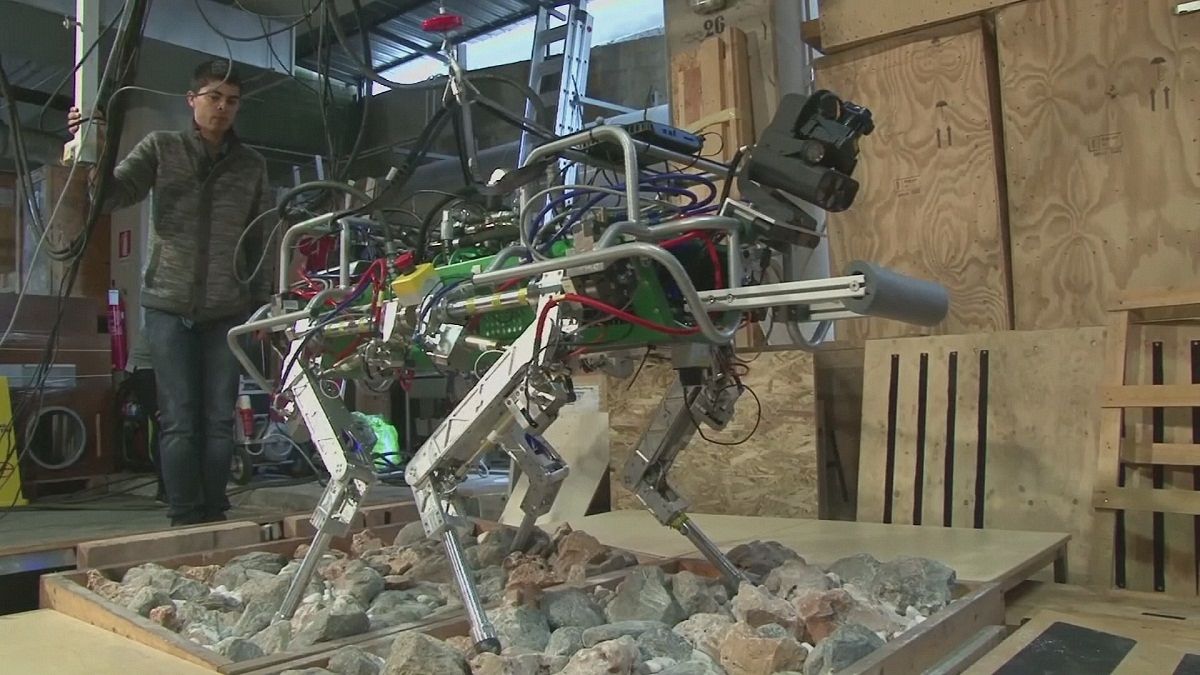
Новое исследование предполагает, что может пройти еще много времени, прежде чем мы сможем безопасно взаимодействовать с роботами на ногах в реальном мире. Под руководством группы исследователей из Университета штата Огайо исследование сосредоточено на этих типах машин, которые используют для движения механические конечности вместо колес. Результаты исследования показывают, что современные модели роботов с ногами не всегда ведут себя предсказуемо в реальных сценариях, что затрудняет прогнозирование их успеха или неудачи в задачах, связанных с движением. Научное сообщество призывает к универсальным правилам испытаний на безопасность мобильных роботов, поскольку они все чаще выполняют более сложные задачи. Интеграция роботов и искусственного интеллекта в нашу повседневную жизнь подчеркивает необходимость стандартизированных мер безопасности. В частности, роботы с ногами представляют значительную угрозу безопасности, поскольку они часто сделаны из металла и могут развивать скорость до 20 миль в час.















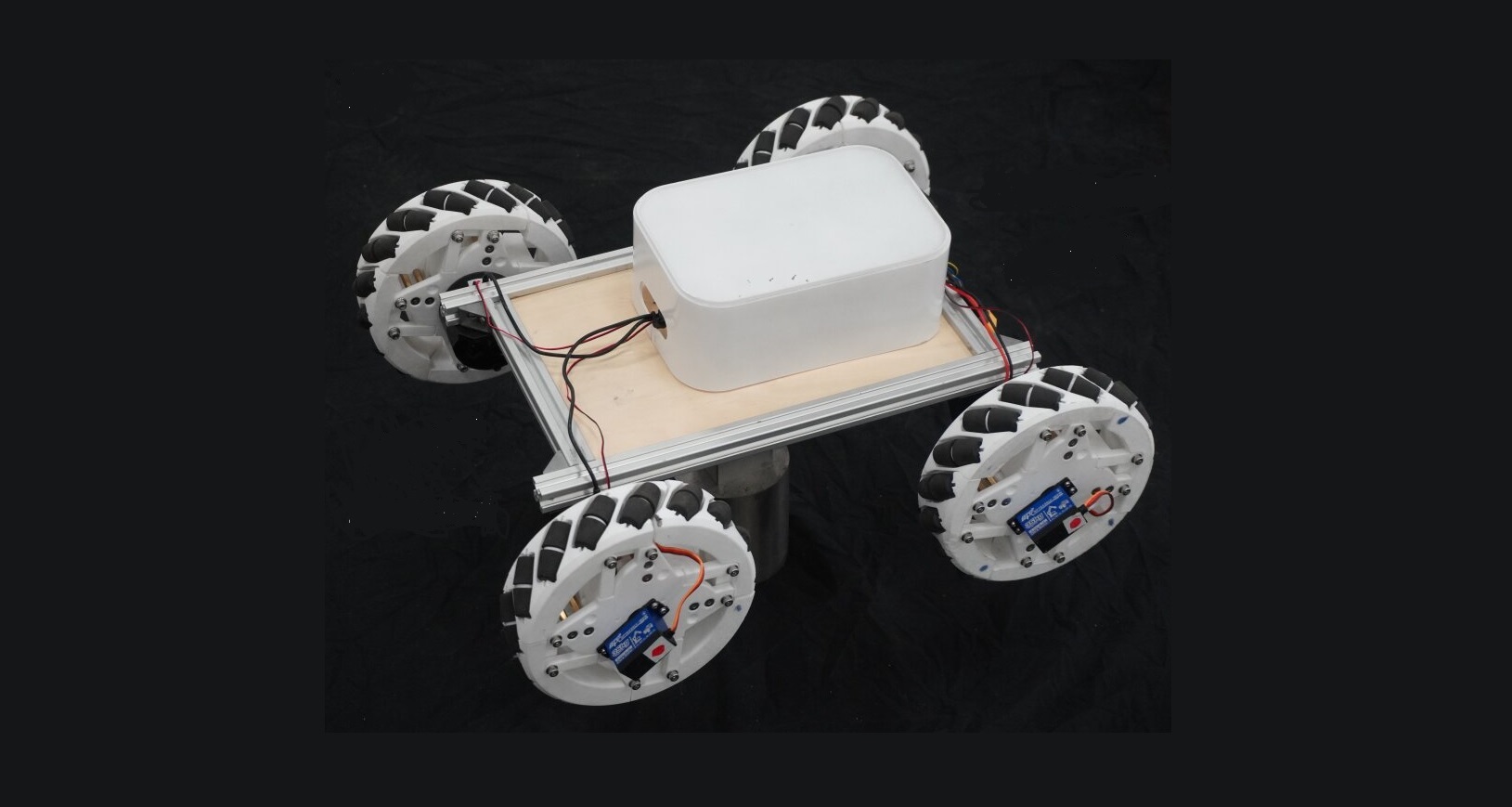
Новый Ascento взял лучшее из обоих типов роботов: у него есть две мощные ноги, да, но с дополнительным колесом на каждом из них. ANYmal абсолютно единственный в своем роде, потому что он имеет 4 ножки с таким количеством моторизованных колес на концах. Сумасшедшая универсальность. Альберто Робиати и Джанлука Риччио знакомят читателей со сценариями будущего: возможностями, рисками и возможностями, которые у нас есть, чтобы создать возможное будущее. Мы сообщаем новости о будущем технологий, науки и общества: если что-то и должно произойти, то оно уже прибыло сюда. Робот на ногах.



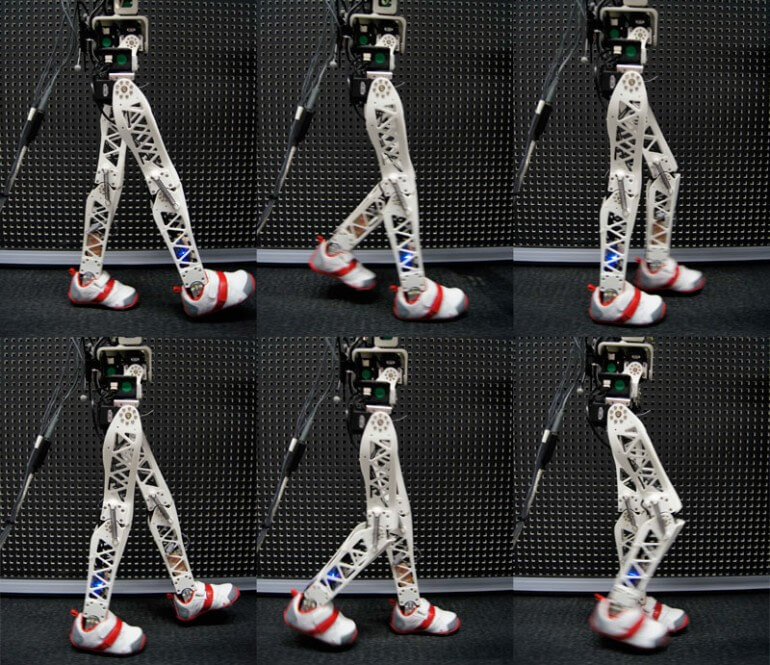




Секрет устойчивого хождения антропоморфного робота на двух ногах в автономном режиме. Version of 17 november Introduction. Over the past half century, many scientific organizations have, with varying success, tried to solve the problem with a walking of anthropomorphic robots on two legs.